
ELTI
Auch in diesem Jahr stellten sich fünf engagierte Teams der Abteilung Elektronik und Technische Informatik der Herausforderung des KELAG Hackathons…
mehr










































































































































































































































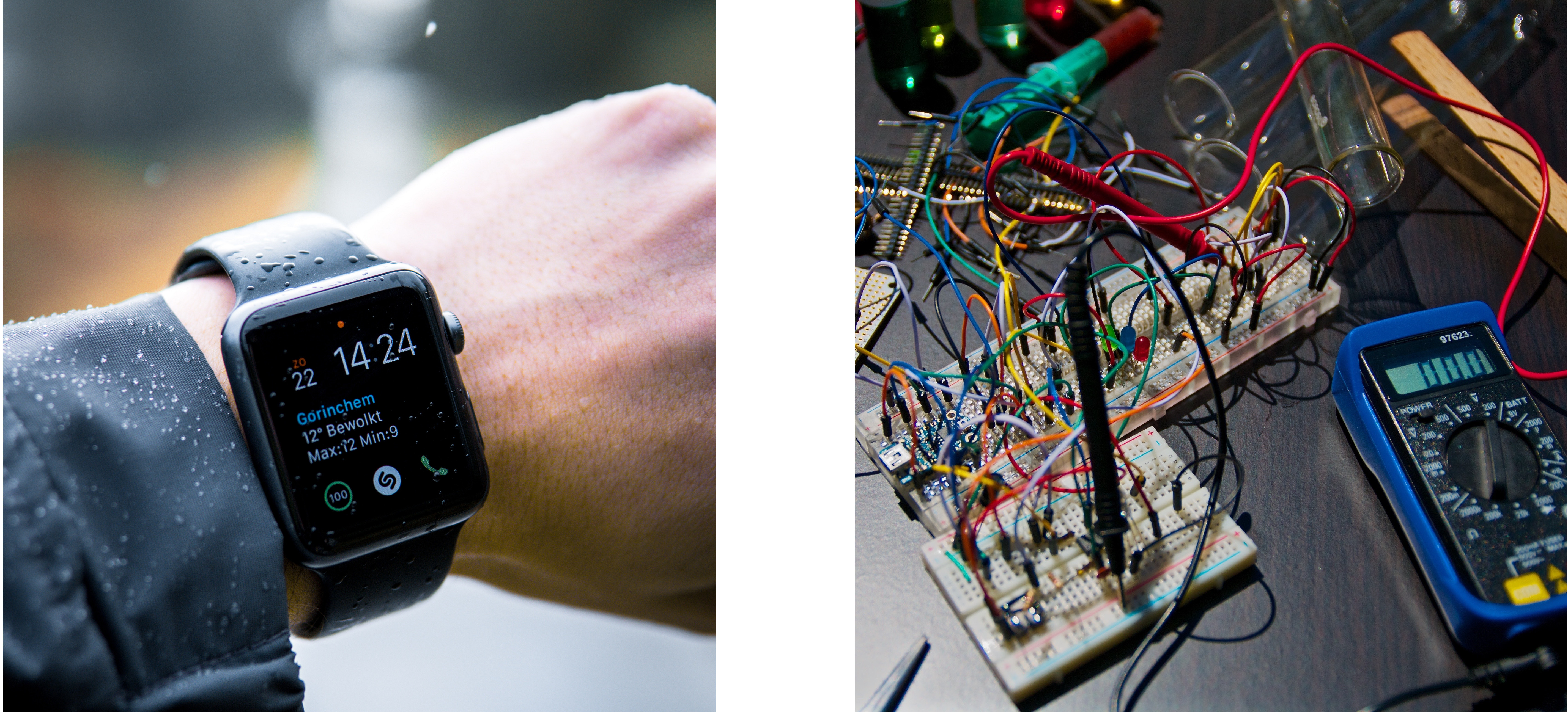



































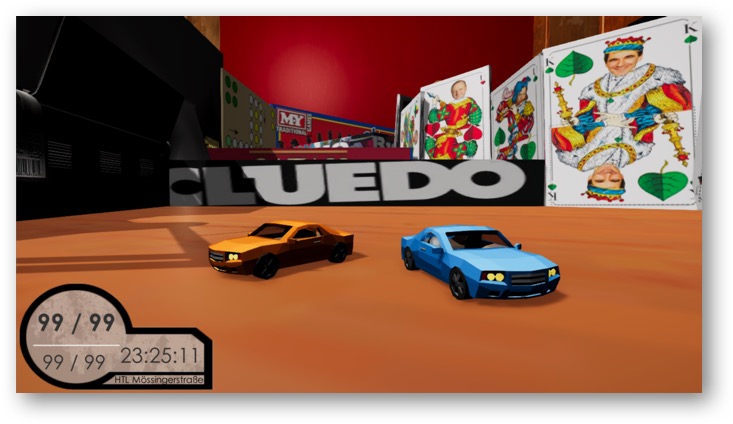








Zu Beginn wurde ein Modellauto so umgebaut, dass die Fernbedienungsbefehle gleichzeitig mit Kamerabildern aufgenommen werden können. Weiters wurde das Auto umgebaut, damit es neben der Fernbedienung auch über den Raspberry Pi gesteuert werden kann. Anschließend konnten wir die ersten Neuronalen Netze trainieren, welche noch nicht so gut funktionierten.
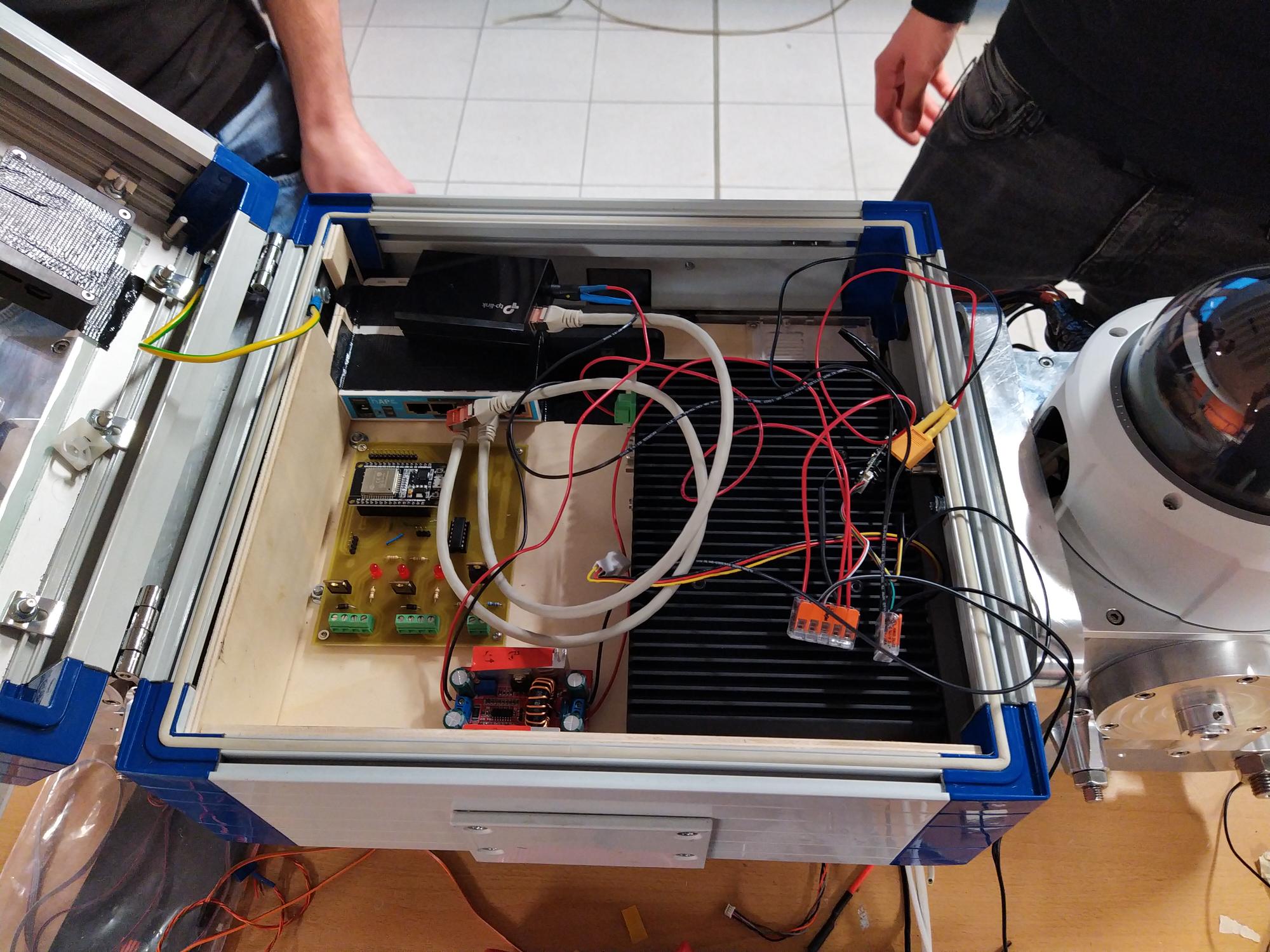
Dies lag einerseits an der Hardware, welche nicht perfekt war, andererseits auch an der Architektur der Netze. Um die Hardwareprobleme zu beheben, haben wir eine Platine produziert. Diese Platine beherbergt alle Hardwarekomponenten vom ESP8266, der H-Brücke bis hin zum Empfänger für die Fernbedienung.
Außerdem haben wir die Architektur der Netzwerke weiterentwickelt und unser Netzwerk mit besseren Trainingsdaten trainiert, wodurch ein erfolgreich fahrendes Auto resultierte. Diese Trainingsdaten wurden auf einer selbst angefertigten Strecke, die aus XPS-Platten besteht, durch manuelles Vorfahren aufgenommen. Es wurde immer ein Bild einem Lenk- und Geschwindigkeitswert zugeordnet.

Die geplanten Ziele wurden erfolgreich umgesetzt. Die Hardware kann jederzeit für weitere Projekte (Versuche) verwendet werden.
Freigegenstand: ProjectBusters
Mitglieder: Tanner Gabriel, Tanner Gilbert, Pichler Alexander, Armbruster Aaron
Betreuer: Guggi Herwig
Auch in diesem Jahr stellten sich fünf engagierte Teams der Abteilung Elektronik und Technische Informatik der Herausforderung des KELAG Hackathons…
mehr
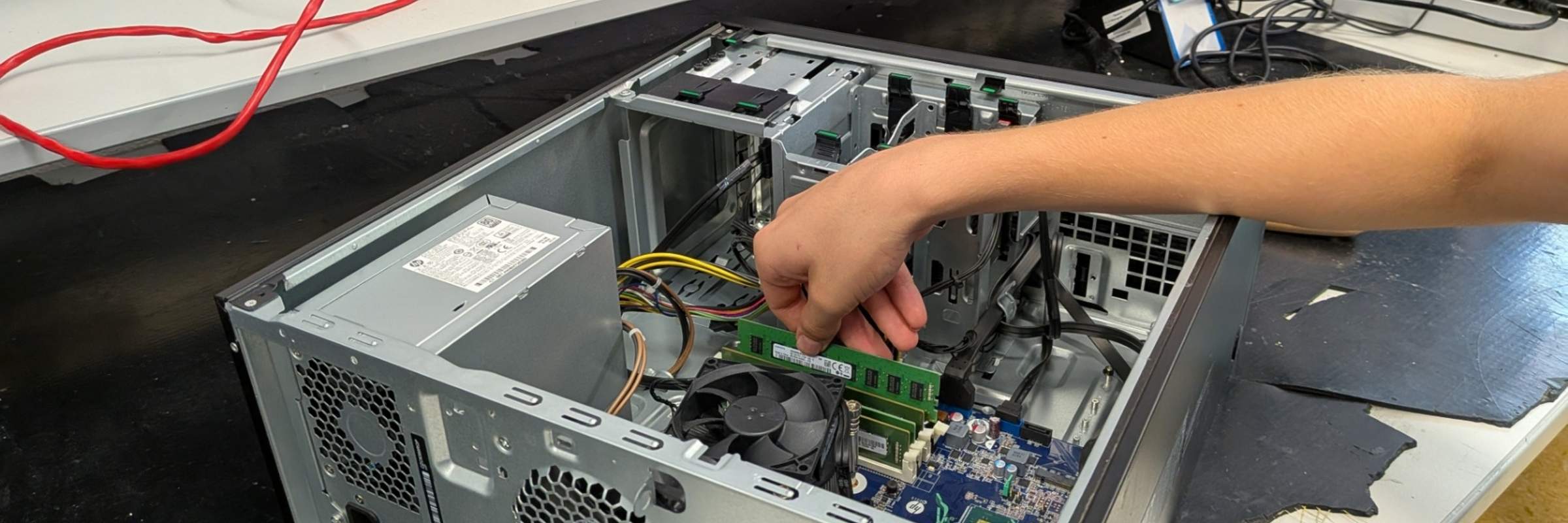
Im Rahmen der Tage der Nachhaltigkeit bereitet die 1CHEL unserer HTL gebrauchte PCs für eine Schule in Ghana auf.
mehr

Im Rahmen unserer Kooperation mit den IT-Services der Barmherzigen Brüder haben wir eine äußerst großzügige Unterstützung erhalten:
mehr