
ELTI
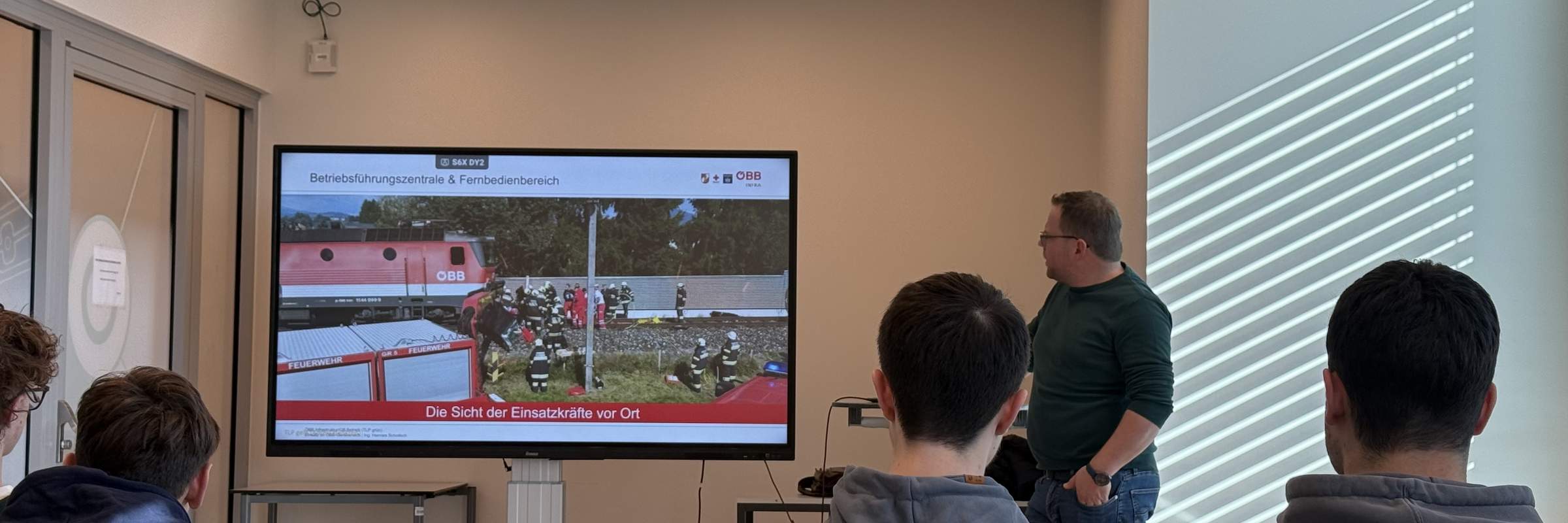
Nach dem Besuch von zwei Gerichtsverhandlungen am Dienstag stand am Mittwoch eine Führung durch das Landhaus Klagenfurt am Programm.
mehr







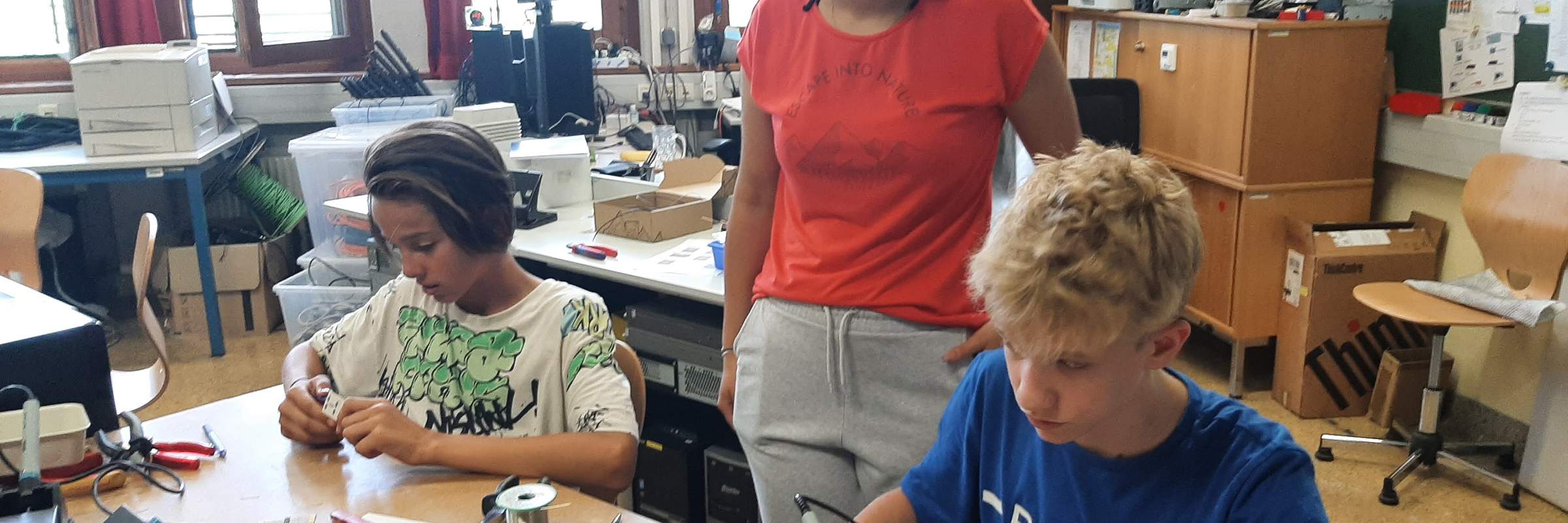



























































































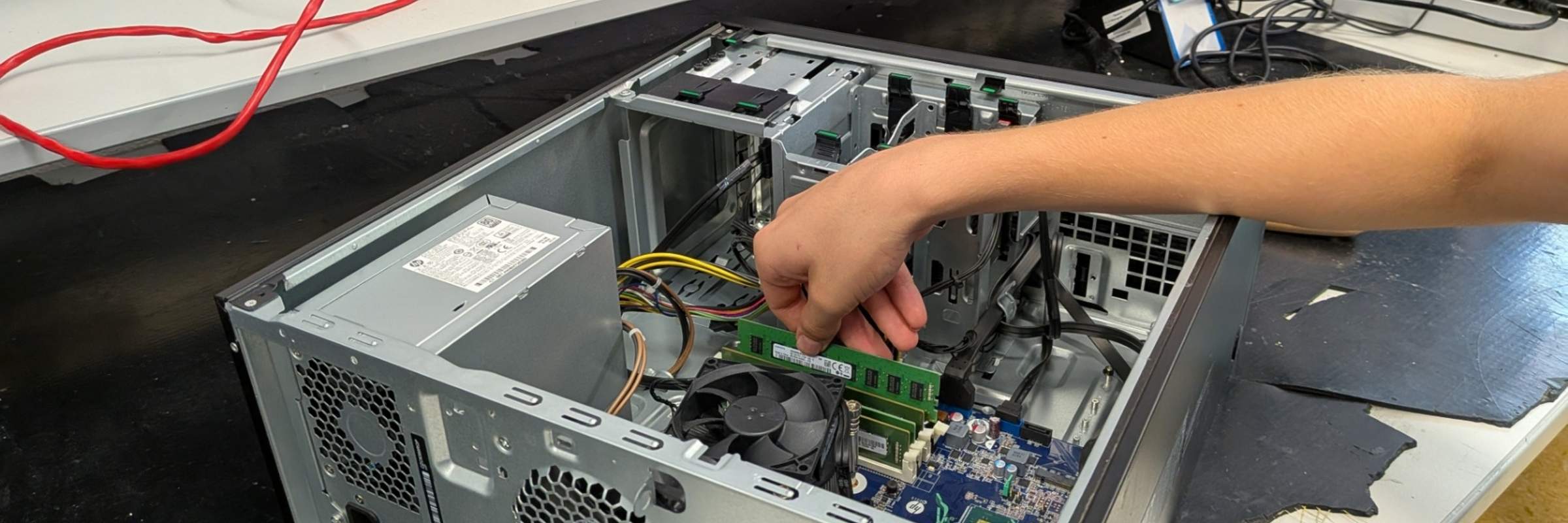

































































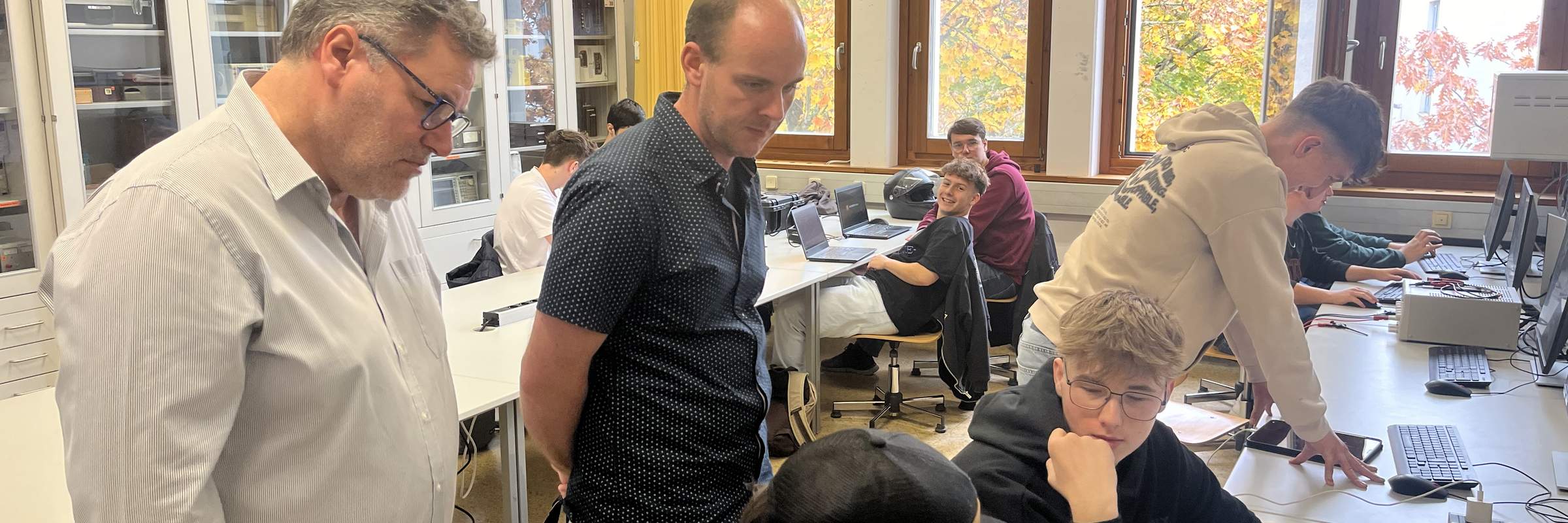

































































































































































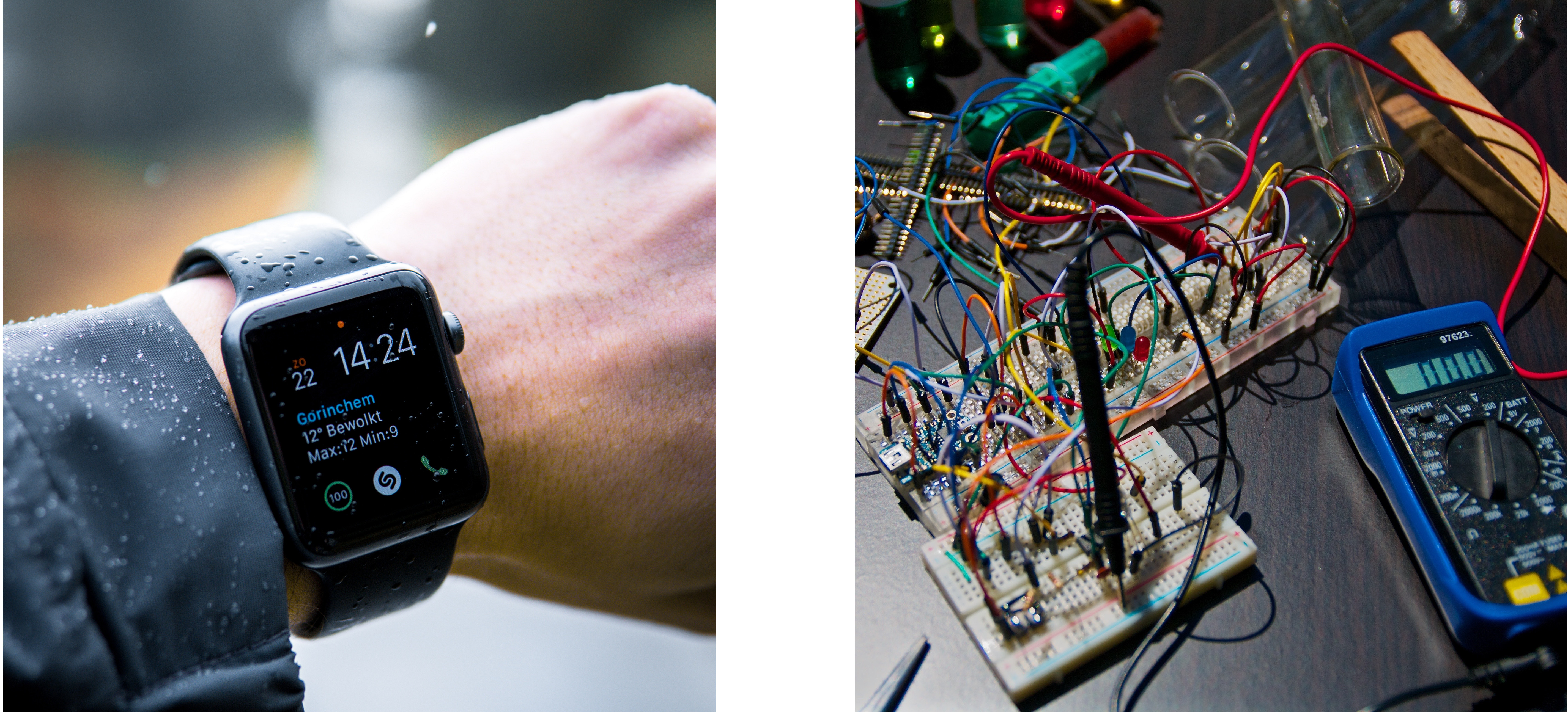

































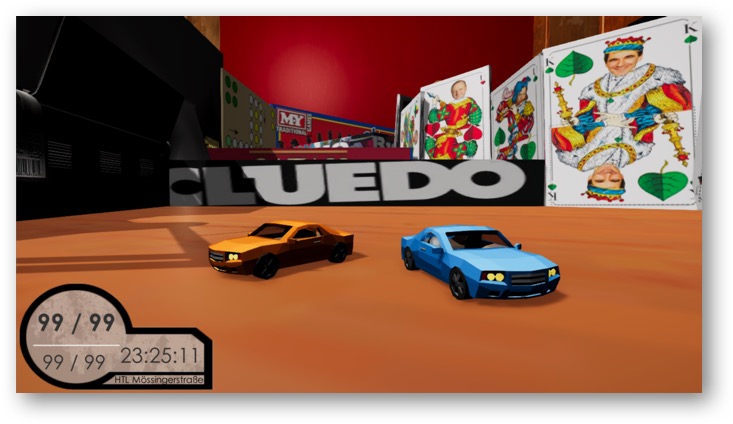








Zu Beginn wurde ein Modellauto so umgebaut, dass die Fernbedienungsbefehle gleichzeitig mit Kamerabildern aufgenommen werden können. Weiters wurde das Auto umgebaut, damit es neben der Fernbedienung auch über den Raspberry Pi gesteuert werden kann. Anschließend konnten wir die ersten Neuronalen Netze trainieren, welche noch nicht so gut funktionierten.
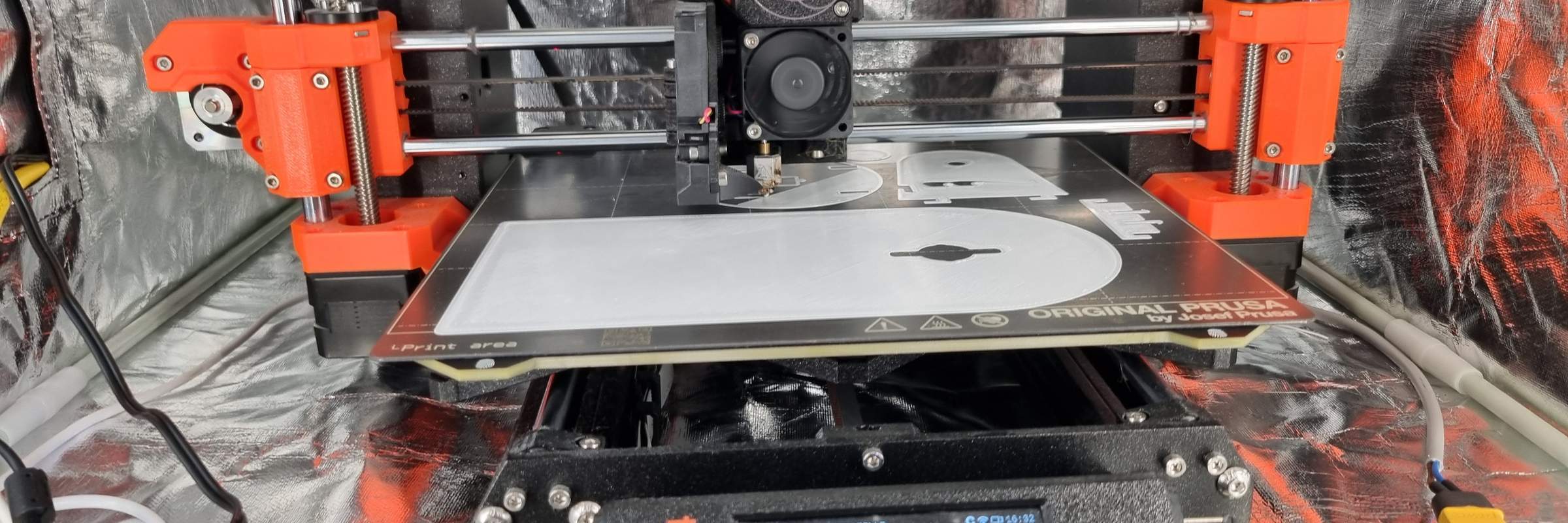
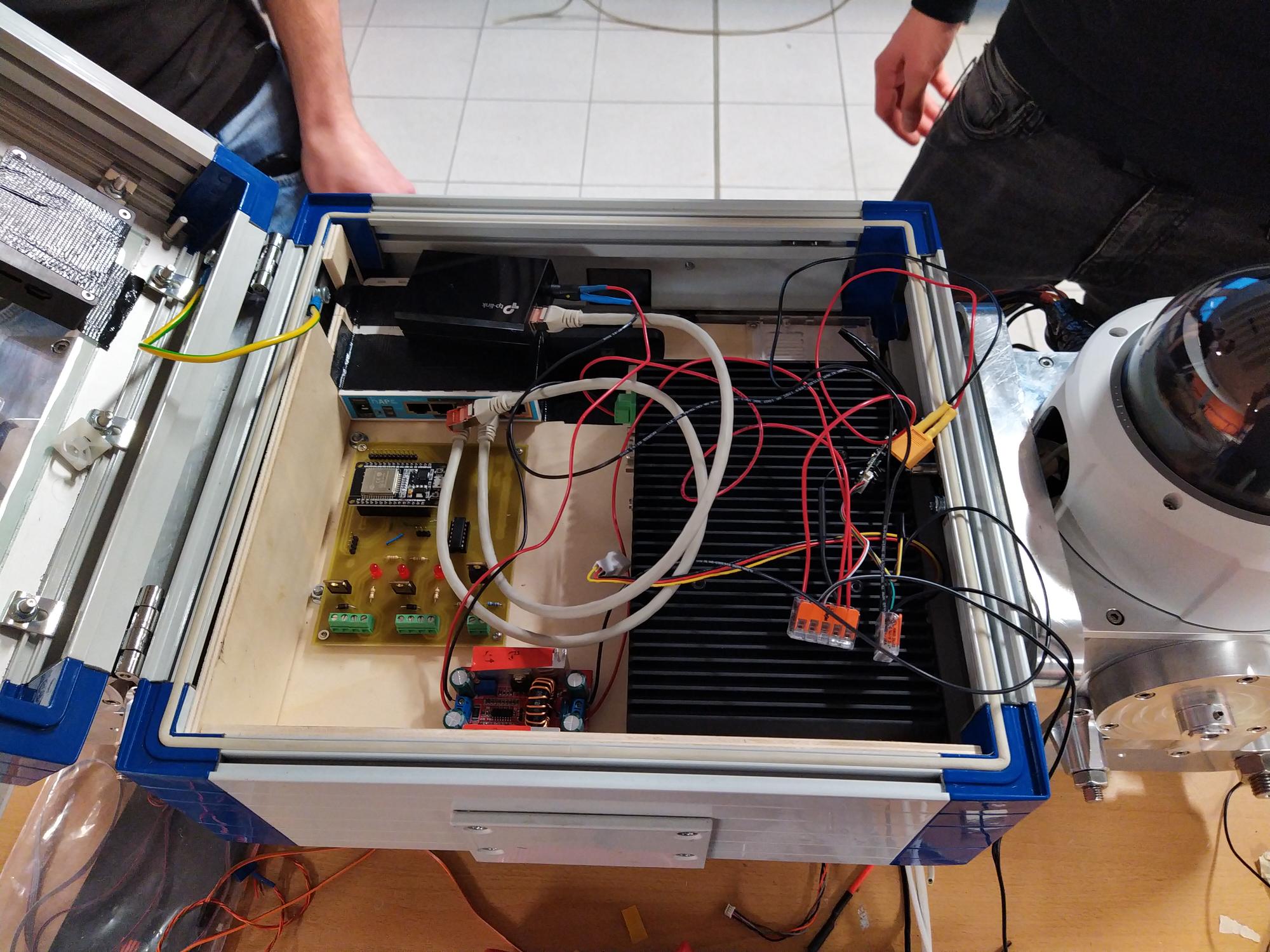
Dies lag einerseits an der Hardware, welche nicht perfekt war, andererseits auch an der Architektur der Netze. Um die Hardwareprobleme zu beheben, haben wir eine Platine produziert. Diese Platine beherbergt alle Hardwarekomponenten vom ESP8266, der H-Brücke bis hin zum Empfänger für die Fernbedienung.
Außerdem haben wir die Architektur der Netzwerke weiterentwickelt und unser Netzwerk mit besseren Trainingsdaten trainiert, wodurch ein erfolgreich fahrendes Auto resultierte. Diese Trainingsdaten wurden auf einer selbst angefertigten Strecke, die aus XPS-Platten besteht, durch manuelles Vorfahren aufgenommen. Es wurde immer ein Bild einem Lenk- und Geschwindigkeitswert zugeordnet.

Die geplanten Ziele wurden erfolgreich umgesetzt. Die Hardware kann jederzeit für weitere Projekte (Versuche) verwendet werden.
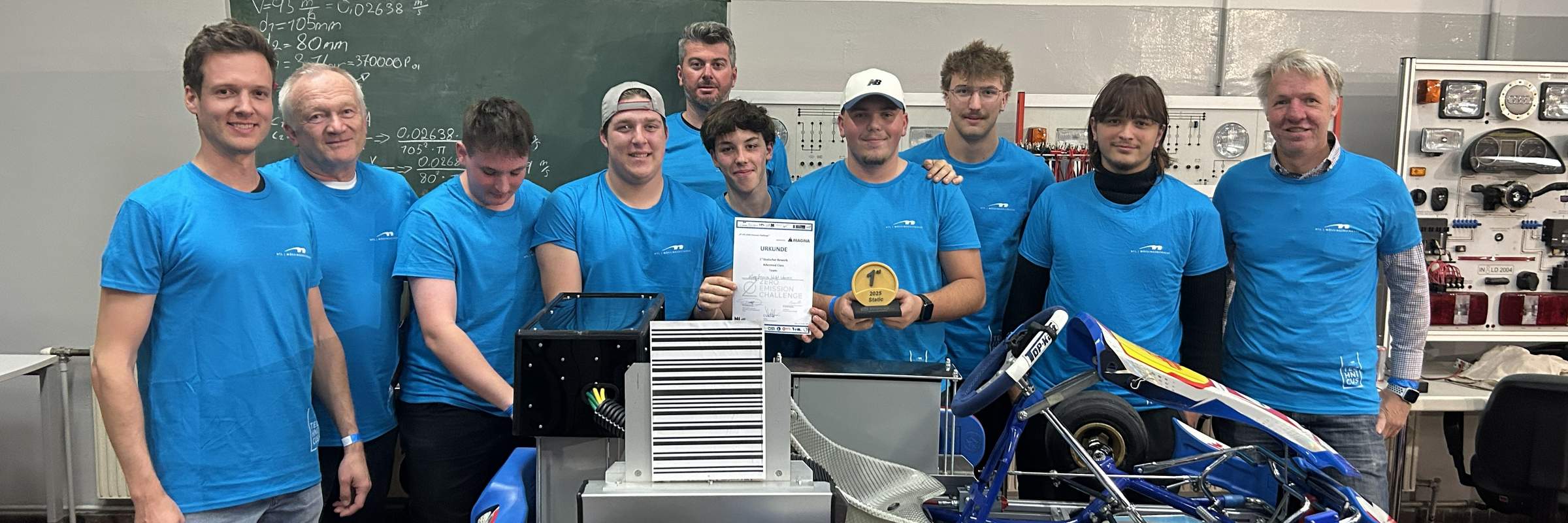
Freigegenstand: ProjectBusters
Mitglieder: Tanner Gabriel, Tanner Gilbert, Pichler Alexander, Armbruster Aaron
Betreuer: Guggi Herwig
Nach dem Besuch von zwei Gerichtsverhandlungen am Dienstag stand am Mittwoch eine Führung durch das Landhaus Klagenfurt am Programm.
mehr


Die 1 AHEL verbrachte am 06.07.2026 mit Frau Prof. Scheinig und Herrn Prof. Jeremias einen tollen Tag in Mallnitz.
mehr